UK Benchmark 3 (Water Module): Difference between revisions
| Line 49: | Line 49: | ||
Measured point graphs are displayed below: | Measured point graphs are displayed below: | ||
<ul> | <ul> | ||
<li style="display:inline-block;">[[velocity_p1_case3_ukbm.png]]</li> | <li style="display:inline-block;">[[File:velocity_p1_case3_ukbm.png]]</li> | ||
<li style="display:inline-block;">[[velocity_p1_others_case3_ukbm.png]]</li> | <li style="display:inline-block;">[[File:velocity_p1_others_case3_ukbm.png]]</li> | ||
: Velocities at p1 generated by the {{software}} on the left and generated by others on the right. | : Velocities at p1 generated by the {{software}} on the left and generated by others on the right. | ||
<li style="display:inline-block;">[[waterlevel_p1_case3_ukbm.png]]</li> | <li style="display:inline-block;">[[File:waterlevel_p1_case3_ukbm.png]]</li> | ||
<li style="display:inline-block;">[[waterlevel_p1_others_case3_ukbm.png]]</li> | <li style="display:inline-block;">[[File:waterlevel_p1_others_case3_ukbm.png]]</li> | ||
: Water levels for p1 generated by the {{software}} on the left and generated by others on the right. | : Water levels for p1 generated by the {{software}} on the left and generated by others on the right. | ||
<li style="display:inline-block;">[[waterlevel_p2_case3_ukbm.png]]</li> | <li style="display:inline-block;">[[File:waterlevel_p2_case3_ukbm.png]]</li> | ||
<li style="display:inline-block;">[[waterlevel_p2_others_case3_ukbm.png]]</li> | <li style="display:inline-block;">[[File:waterlevel_p2_others_case3_ukbm.png]]</li> | ||
: Water levels for p2 generated by the {{software}} on the left and generated by others on the right. | : Water levels for p2 generated by the {{software}} on the left and generated by others on the right. | ||
</ul> | </ul> | ||
Revision as of 17:08, 19 April 2019
This page contains the test case 1 of the UK benchmark named Test 3 – Momentum conservation over a small obstruction as well as its result generated by the Water Module in the Tygron Platform.
The objective of the test is to assess the package’s ability to conserve momentum over an obstruction in the topography. This capability is important when simulating sewer or pluvial flooding in urbanised floodplains. The barrier to flow in the channel is designed to differentiate the performance of packages without inertia terms and 2D hydrodynamic packages with inertia terms. With inertia terms some of the flood water will pass over the obstruction.
Description
This test consists of a sloping topography with two depressions separated by an obstruction as illustrated in Figure (a & b). The dimensions of the domain are 300m longitudinally (X) x 100m transversally (Y). A varying inflow discharge, see Figure (c), is applied as an upstream boundary condition at the left-hand end, causing a flood wave to travel down the 1:200 slope. While the total inflow volume is just sufficient to fill the left-hand side depression at x=150m, some of this volume is expected to overtop the obstruction because of momentum conservation and settle in the depression on the right-hand side at x=250m. The model is run until time T=900s (15 mins) to allow the water to settle.


- Plan and profile of the DEM use in Test 3. The area modeled is a perfect rectangle extending from X=0 to X=300m and from Y=0 to Y=100m as represented.

Boundary and initial conditions
Varying water level along the dashed red line in Figure (a). Table provided as part of dataset. All other boundaries are closed.
Initial condition: Water level elevation = 9.7m.
Parameter values
- Manning’s n: 0.01 (uniform)
- Model grid resolution: 5m (or 1200 nodes in the area modeled)
- Time of end: the model is to be run until time t = 15 min
Technical setup
The provided ascii height file named test1DEM.asc is first imported. It has a cell size of 2m, while the test is expected to run on a 5m grid. Therefore, it will be automatically rescaled by the grid rasterizer. The resulting rescaled asc file is packed in the down below.
In order to regulate the water level according to the water level graph, we used the following setup: On gridcells with x = 1 and x = 2 Inlet objects were placed. Each inlet had its own grid cell. The inlets were configured as:

- External area (m2): 1 000 000 000;
- Water level (m): 1;
- Threshold (m): none;
- Inlet Q (m):
[[File:]]
Output as required
- Software package used: Tygron Platform
- Numerical scheme: FV (Kurganov, Bollerman, Horvath)*
- Specification of hardware used to undertake the simulation:
- Processor: Intel Xeon @2.10GHz x 8,
- RAM 62.8 GiB,
- GPU: 2x NVidia 1080
- Operating system: Linux 4.13
- Time increment used: adaptive:
- Grid resolution: 10 m.
- Simulation time: 4 seconds for 450 timeframes
- Inlet q M3: 1189 m3
- Remaining volume water: 1094 m3
Measured point graphs are displayed below:
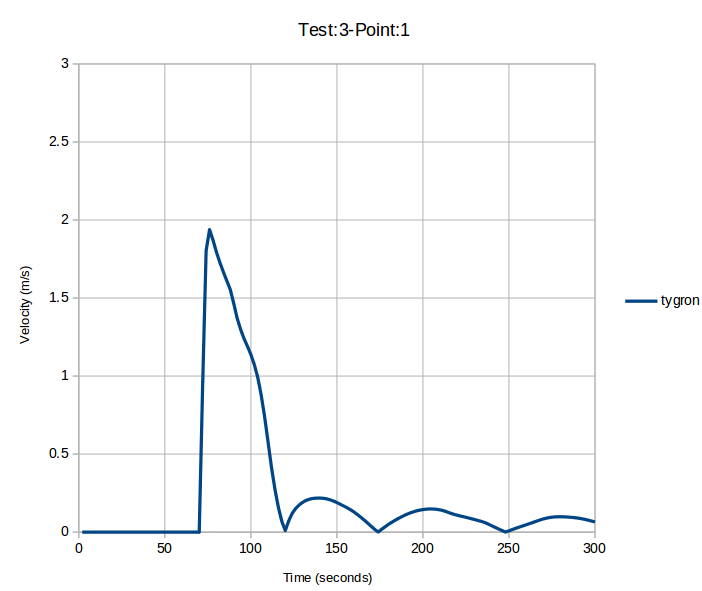
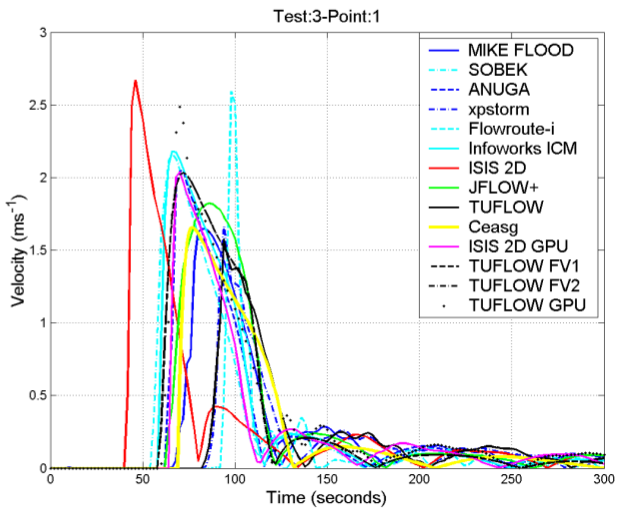
- Velocities at p1 generated by the Tygron Platform on the left and generated by others on the right.
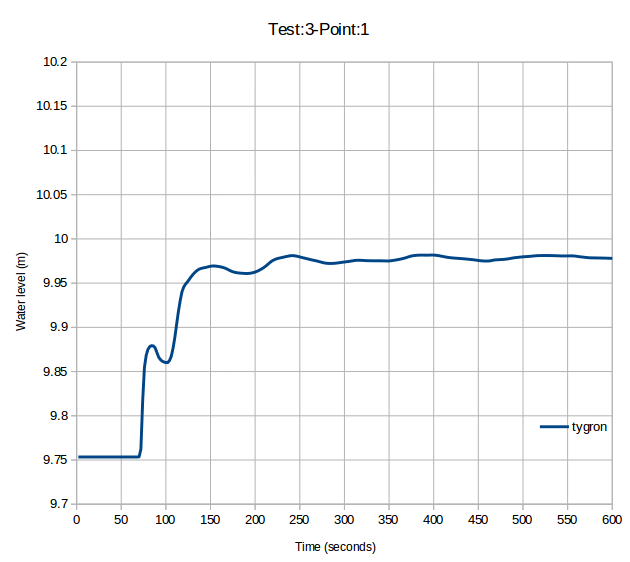
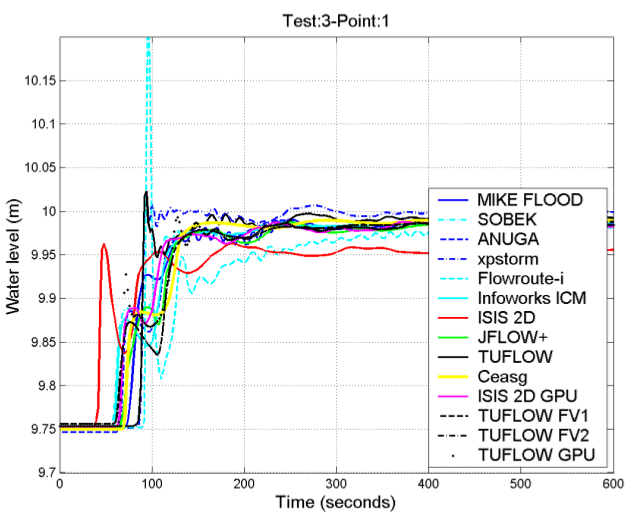
- Water levels for p1 generated by the Tygron Platform on the left and generated by others on the right.
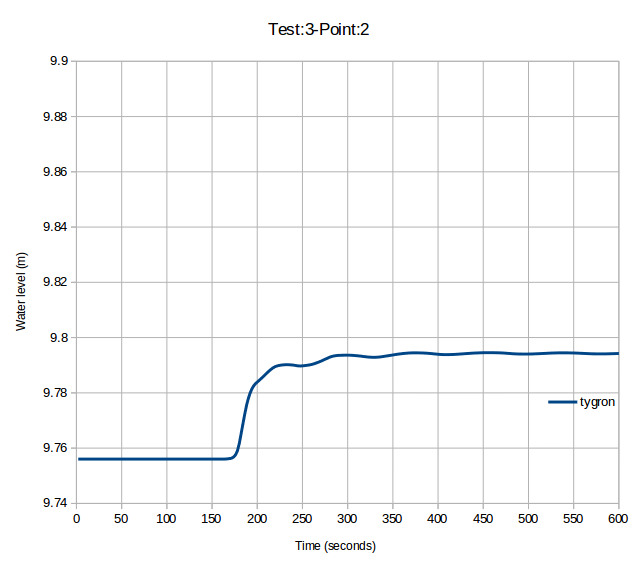
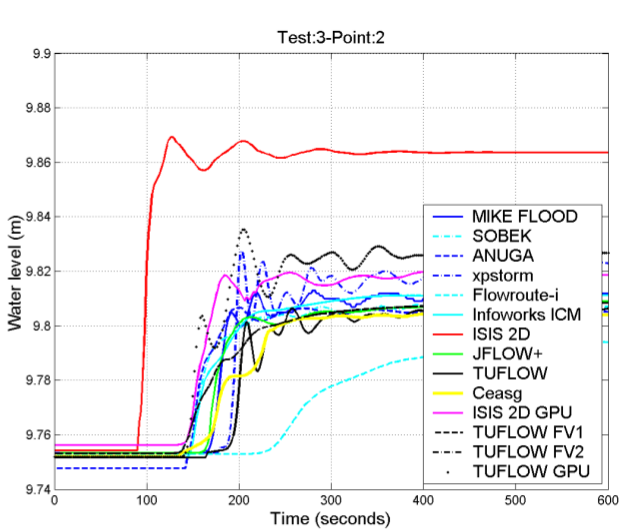
- Water levels for p2 generated by the Tygron Platform on the left and generated by others on the right.






Notes
- Issue: Inlet inputs less water with the many 2 second time frames: 1189 m3 ( instead of 1310 m3 )
- Issue: Waterloss of about 8%, which is currently under investigation.